翻译并归纳出来就是
- 自动化控制的;
- 可重复编程或导入新控制程序的;
- 多用途的操作机构;
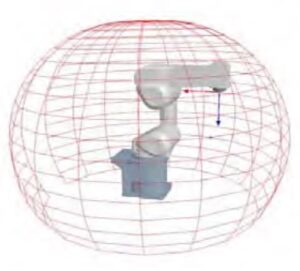
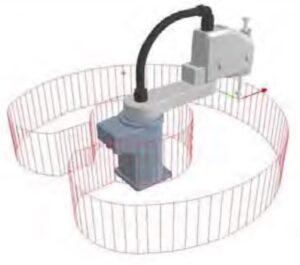
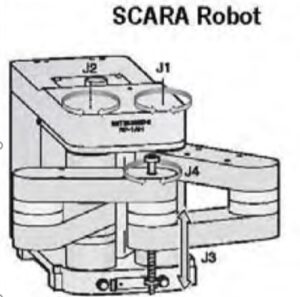
可以对不少于3个运动轴进行程序控制、可以安装在工业环境工作、或者在工业环境内移动并工作。
其中:可编程指不用通过更换物理工具或附件,就可以完成相应程序指定的动作和工作。多用途指的是通过更换可选择的附件等,可以完成不同的作业任务。其中的物理工具或者可选择附件,不包括电子存储类器件。轴指的是机器人特定的某一个直线或者旋转的运动方向。
解释:这个定义是狭义的定义,把一些特定的专用机器或者机构不再算作独立的机器人,尤其是成套自动化设备的上料、装载部分,或者其他功能动作比较简单的装配、夹持等。按这个定义,AGV被归类为服务机器人。
举例:按这个定义,有些时候仍会有一些让人容易困惑的地方。比如,位于中国天津的“阿童木机器人”的典型的2自由度机器人,就不算作是典型的工业机器人了。其实是并联三角机器人(虚拟轴结构)的简化版,但主驱动运动只有两轴联动。当然,这个结构只是把机械手移动到物体,如果在下端增加机械手,即使只是一个旋转夹持动作,就又算作工业机器人了。但如果是电控磁性吸盘,就又不算了。